Contacto




Investigadores desarrollan anclajes tipo perforación para que robots podrán tener piel viva adherida a sus estructuras mecánicas.
CONTENIDOS
Los robots podrán tener piel como en la ciencia ficción
En la película “El hombre bicentenario”, el androide llamado Andrew Martin experimenta una transformación fascinante cuando se le fabrica una piel artificial para su rostro. Inspirados en los ligamentos de la piel humana, en los futuros robots reales los anclajes tipo perforación desempeñarán un papel crucial en este proceso. Estos anclajes permiten adherir la piel viva al esqueleto robótico similar al de Andrew, imitando la estructura y funcionalidad de los ligamentos cutáneos. La técnica de gelificación del tejido de la piel a través de perforaciones asegura una unión segura y natural, permitiendo que los robots expresen emociones y realicen movimientos faciales con mayor autenticidad. Este avance representa un hito en la creación de robots con apariencia más humana y capacidades biohíbridas.
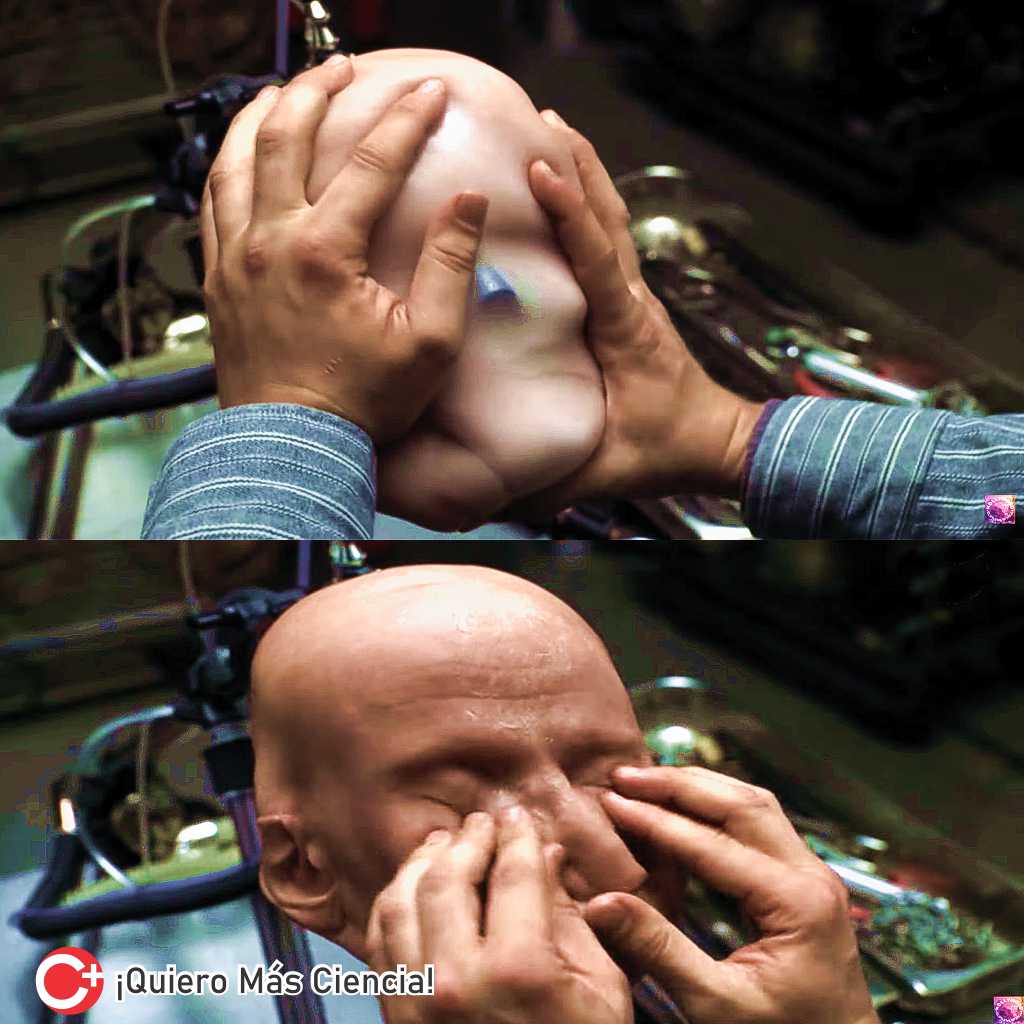
“El hombre bicentenario” es una película de ciencia ficción estadounidense de 1999 basada en el libro de Isaac Asimov y protagonizada por Robin Williams, en la imagen están construyendo la piel del robot con apariencia humana.
Moldes faciales en 3D y robots de piel en 2D
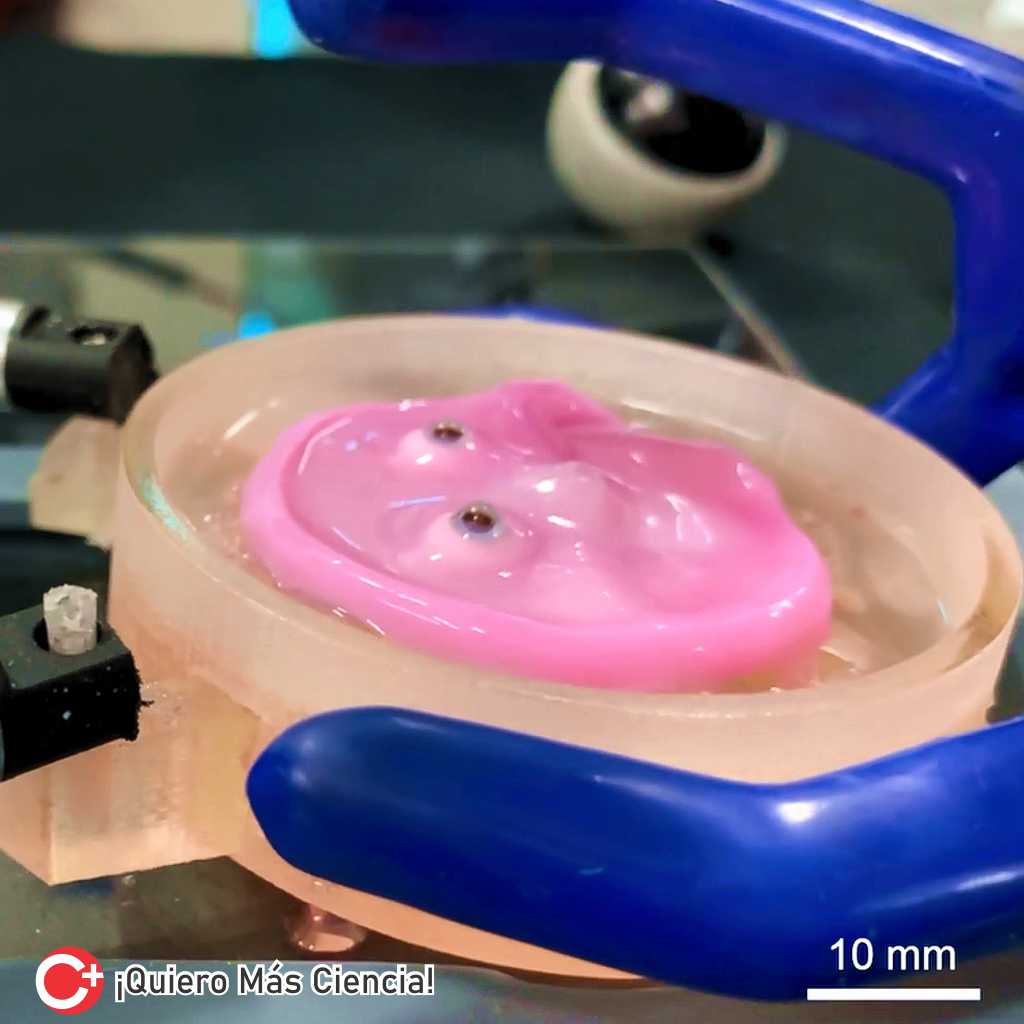
Un grupo de científicos de la Universidad de Tokio y Harvard investiga cómo desarrollar piel artificial que imite el movimiento de la piel humana. El desafío radica en asegurar que esta piel se adhiera correctamente a una capa subcutánea. Para abordar esto, han empleado una técnica denominada “anclajes tipo perforación”, inspirada en los ligamentos de la piel. Durante su investigación, han generado modelos experimentales que resultan ser tanto inquietantes como encantadoras.
La investigación ha logrado crear moldes faciales tridimensionales y robots de piel bidimensionales cubiertos con piel viva, utilizando los anclajes tipo perforación. Este logro demuestra la versatilidad de los anclajes para aplicaciones de cobertura en tres dimensiones, permitiendo que los equivalentes de piel se adhieran uniformemente a estructuras complejas. La capacidad de cubrir un molde facial 3D con piel viva abre nuevas posibilidades para la robótica biohíbrida, mejorando la interacción humano-robot y acercando la tecnología a la reproducción de características humanas reales.
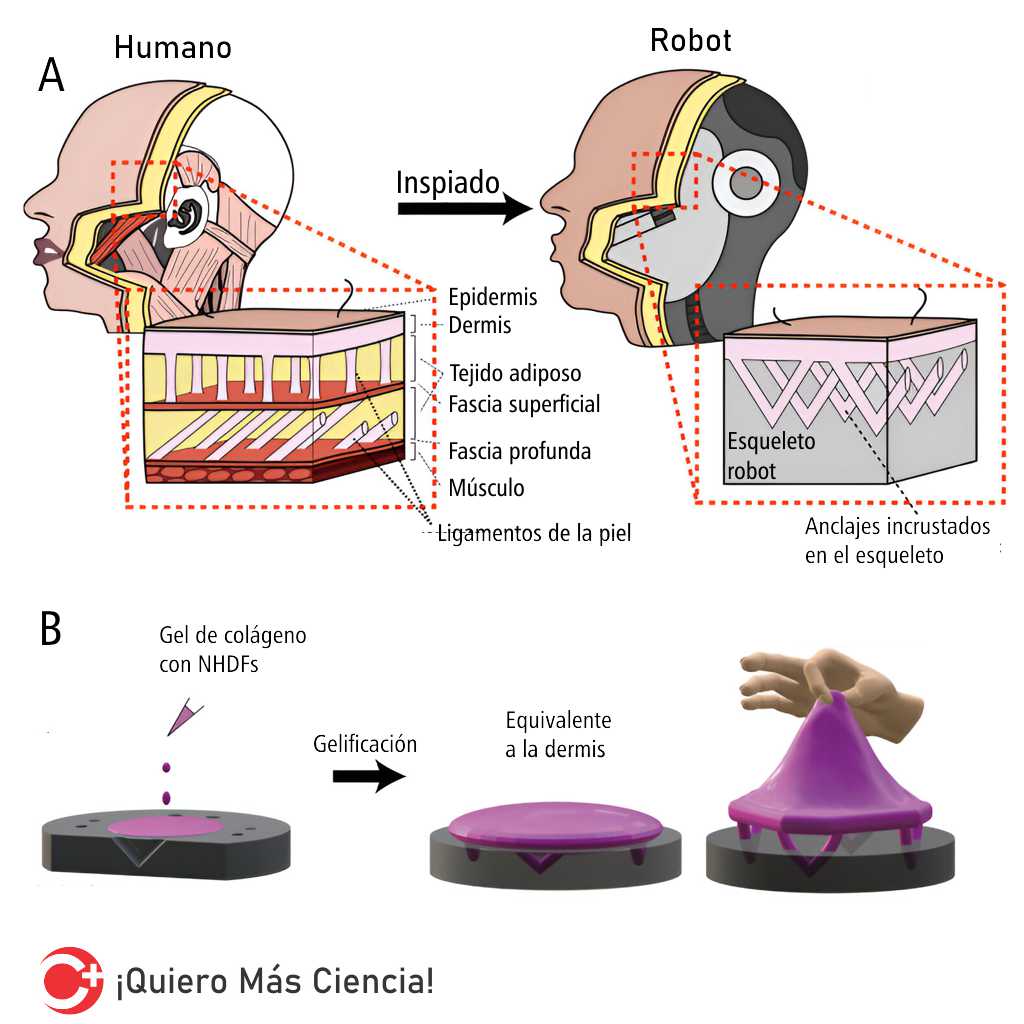
(A) Ilustración conceptual de un anclaje de tipo perforación inspirado en los ligamentos de la piel para cubrir robots con equivalentes de piel.
(B) Proceso de fijación del tejido mediante anclajes de tipo perforación.
Los robots podrán tener piel: la Robótica biohíbrida
La robótica biohíbrida es un campo emergente que combina materiales biológicos vivos con sistemas robóticos para crear entidades que poseen tanto características biológicas como mecánicas. La integración de piel viva en robots es un ejemplo destacado de esta disciplina, ofreciendo ventajas como la autorreparación y la sensibilidad táctil. Los anclajes tipo perforación facilitan la unión de tejidos vivos a robots, lo que podría revolucionar la forma en que interactuamos con las máquinas y ampliar las aplicaciones de la robótica en campos como la medicina y la interacción social.
Tratamiento de Plasma para la Penetración de Colágeno en Anclajes
El tratamiento de plasma para la penetración de colágeno en anclajes es un proceso para lograr la fijación de la piel utilizando anclajes tipo perforación. Este tratamiento mejora la hidrofilización del dispositivo, permitiendo que el gel de colágeno penetre eficazmente en el interior de los anclajes. La investigación demostró que el tratamiento de plasma reduce significativamente el ángulo de contacto del colágeno y aumenta el área de dispersión del mismo, facilitando así la entrada de la solución de colágeno en los anclajes y mejorando la adhesión tisular.
Te Puede Interesar:
El robot contorsionista Unitree G1 que rompe nueces en Video: Los robots podrán tener piel similar a la humanaPrevención de la Contracción de la Dermis con Anclajes
Los anclajes tipo perforación desempeñan un papel fundamental en la contracción de la dermis equivalente. A través de pruebas de contracción, se observó que los anclajes de 3 mm limitaban eficazmente la contracción del tejido, manteniendo su integridad estructural. Los resultados indicaron que incluso anclajes de 1 mm de diámetro podían prevenir la contracción del tejido, lo que sugiere que los anclajes tipo perforación podrían ser una solución viable para mantener la forma y la funcionalidad de la piel sintética en aplicaciones robóticas.
La integración de tejido vivo en robots podría revolucionar la medicina; robots podrán tener piel con capacidad de autorreparación.
Los robots podrán tener piel: Prueba de Tensión de los Anclajes
La prueba de tensión de los anclajes tipo perforación es esencial para evaluar su resistencia y eficacia. Los ensayos revelaron que a medida que aumenta el diámetro de los anclajes, también lo hace la fuerza de tensión máxima que pueden soportar. Esto implica que el diseño de los anclajes debe equilibrar la fuerza de fijación requerida y las limitaciones de colocación para cada caso específico, asegurando así una adhesión óptima de la piel sintética a las estructuras robóticas.
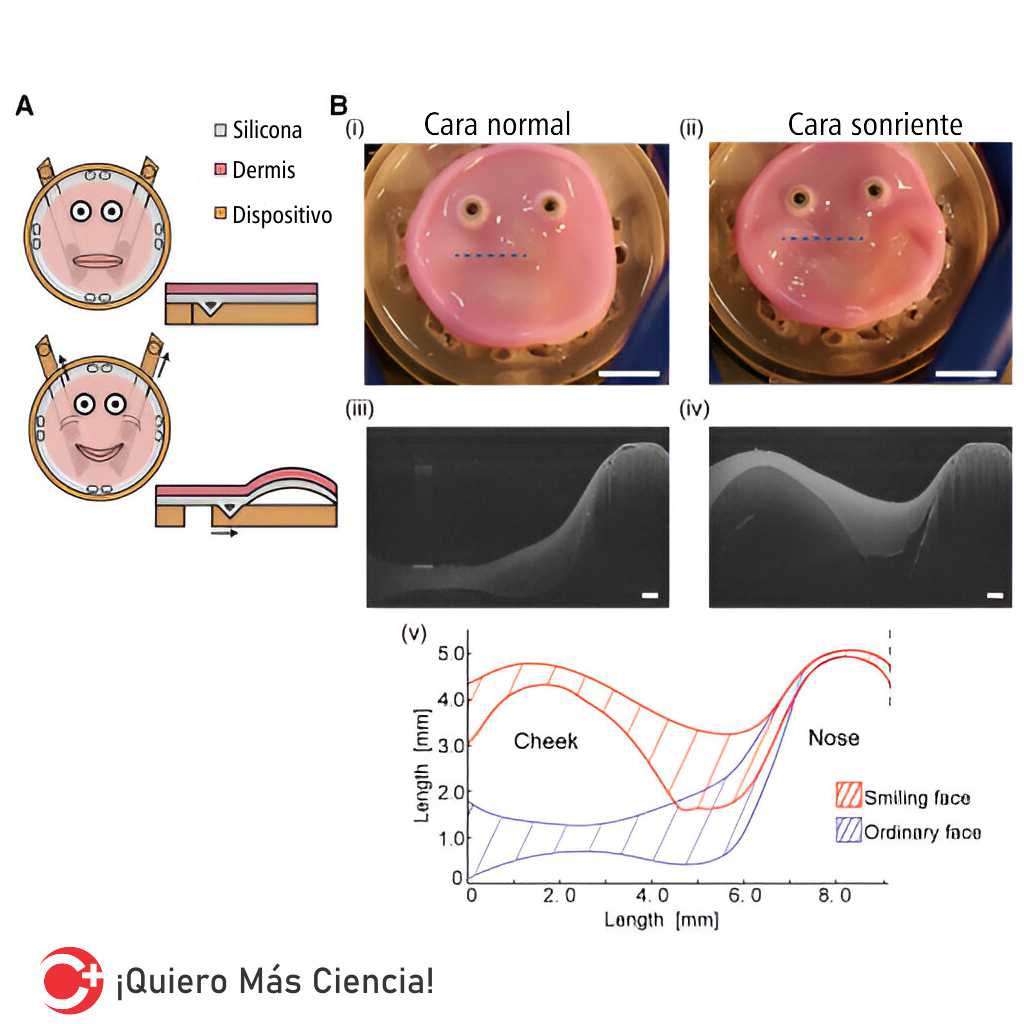
IMAGEN NO ENCONTRADA
Número y Disposición de Anclajes de la piel
La simulación por elementos finitos es una herramienta crucial para entender la influencia de la cantidad y disposición de anclajes en la robótica biohíbrida. A través de esta técnica, se puede predecir el comportamiento de los anclajes bajo diferentes cargas y condiciones, lo que permite diseñar sistemas de anclaje más eficientes y seguros. La optimización de estos factores es esencial para garantizar la estabilidad y durabilidad de la piel viva en aplicaciones robóticas, asegurando que la piel pueda adherirse correctamente sin sufrir daños o desprendimientos durante el movimiento del robot.
Para seguir pensando
El modelado facial 3D utilizando piel equivalente representa un avance significativo en la robótica biohíbrida y la medicina estética. Esta tecnología permite replicar la textura y funcionalidad de la piel humana, ofreciendo nuevas posibilidades para la reconstrucción facial y la creación de prótesis más realistas. Además, la piel equivalente tiene el potencial de auto-repararse y adaptarse a cambios en el entorno, lo que podría revolucionar el cuidado de la salud y la interacción humano-robot. La síntesis de este proceso refleja la convergencia de la ingeniería de tejidos y la robótica, abriendo un camino hacia futuras aplicaciones que mejoren la calidad de vida de las personas.